
相关题库推荐
 2026-01-20
2026-01-20
 共150道
共150道
相关试题
单选题 以下不会影响机器人当前直交位置数据矩阵的是_______
单选题 已知工业机器人终端法兰面装有如下图所示的3只抓手,当执行完指令语句TOOL(17,-29.4,0,0,0,0)后,机器人控制点转移至哪只抓手的中心_______。 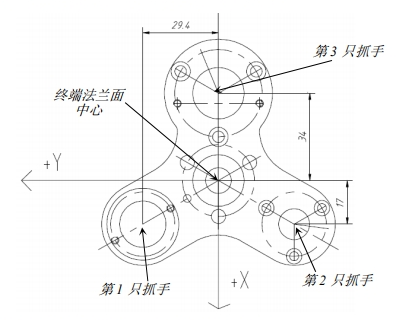
单选题 已知机器人的当前世界坐标系{U}与基座坐标系{B}重合,在世界坐标系{U}下有一个新的坐标系{U1},如下图所示。若要重新将坐标系{U1}作为世界坐标系,则该基座坐标系的Base参数为_______。 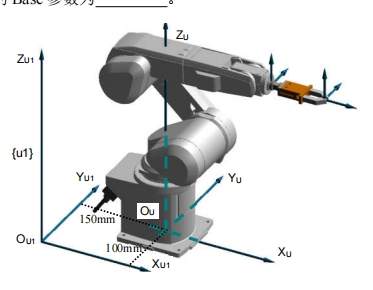
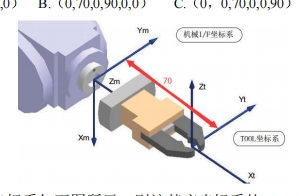
单选题 已知新的基座坐标系如下图所示,则该基座坐标系的Base参数为_______。 (缺图)
单选题 以下描述正确的是_______。
单选题 以下笛卡尔坐标系表示正确的是__________ (缺图)【缺少答案,请补充】
单选题 直交位置数据中(X,Y,Z,A,B,C)是指以下哪个点的空间位置:______
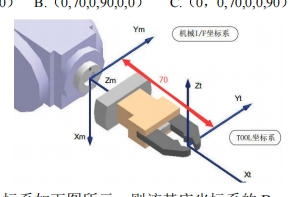
单选题 已知新的工具坐标系如下图所示,则该工具坐标系的Tool参数为______。